ダウンロード/マニュアル python で操作 g-raph 本体とtcp/ip接続してJSONを使ったコミュニケーションができます。 サーバー起動方法(デフォルトでg-raph起動時にサーバーもスタートしています) パイソンモジュール ‘py_g_rap...
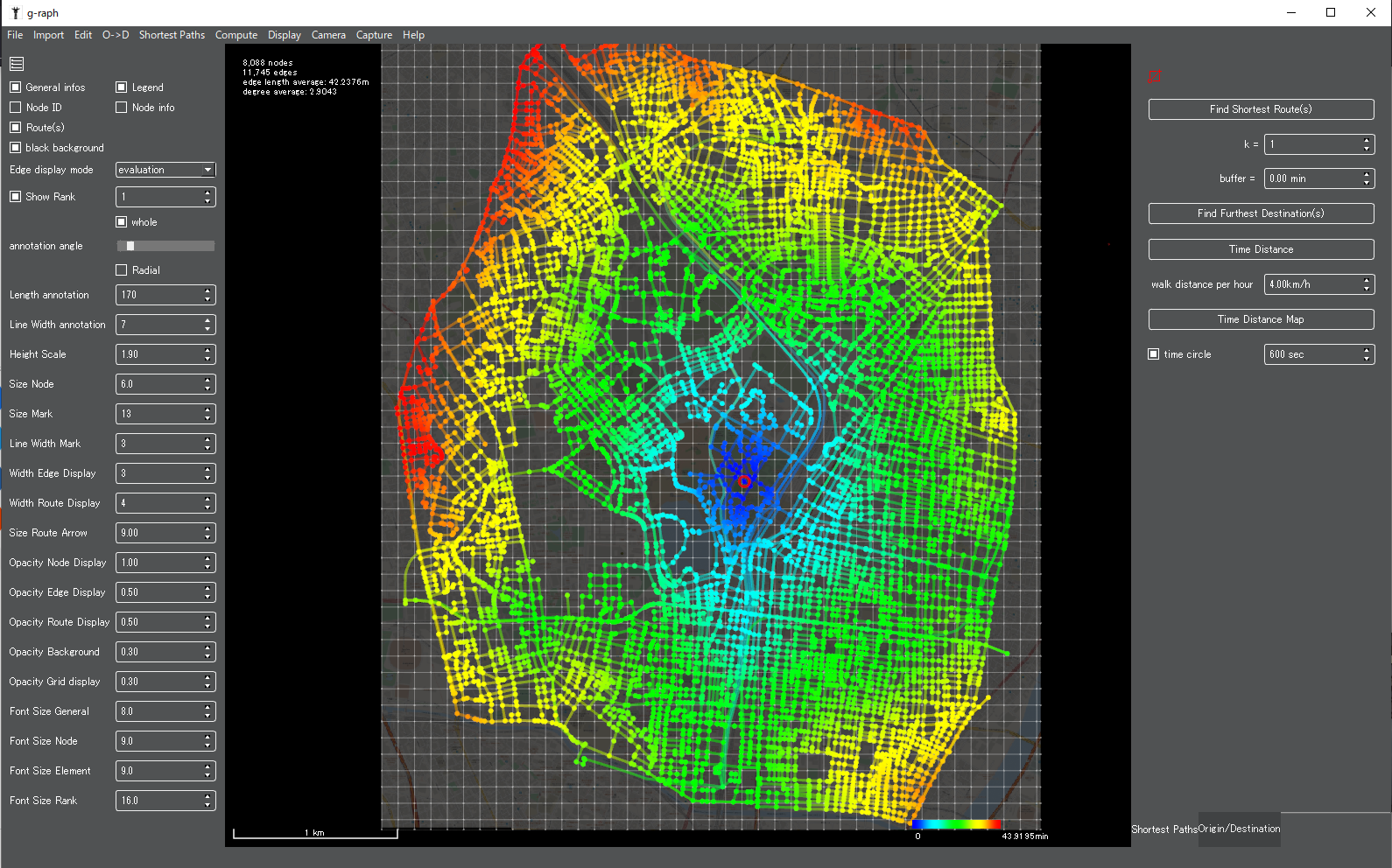
マニュアル ディスプレイ General infos: 一般情報の表示・非表示を切り替えます。 Legend: ヒートマップ凡例の表示・非表示を切り替えます。 Node ID: ノードIDの表示・非表示を切り替えます。 Node info: ノー...
マニュアル ヘルプ about g-raph: g-raphのバージョン、プラグインのバージョンなどを表示します。 manual: g-raphのマニュアルサイトを開きます(インターネット接続が必要です)。 check updates: g...
マニュアル カメラ Load Camera Setting: 視点設定ファイルから、視点を設定します。 Save Camera Setting: 現在の視点設定をファイルに保存します。 Fit Camera: ネットワーク全体を画面内にフィ...
マニュアル コンピューティング Abort Computing(esc): 現在の計算を中断します。 show computing process: 計算プロセスを描画します。描画にリソースを使うため、計算に時間がかかる場合があります。 Degree:...
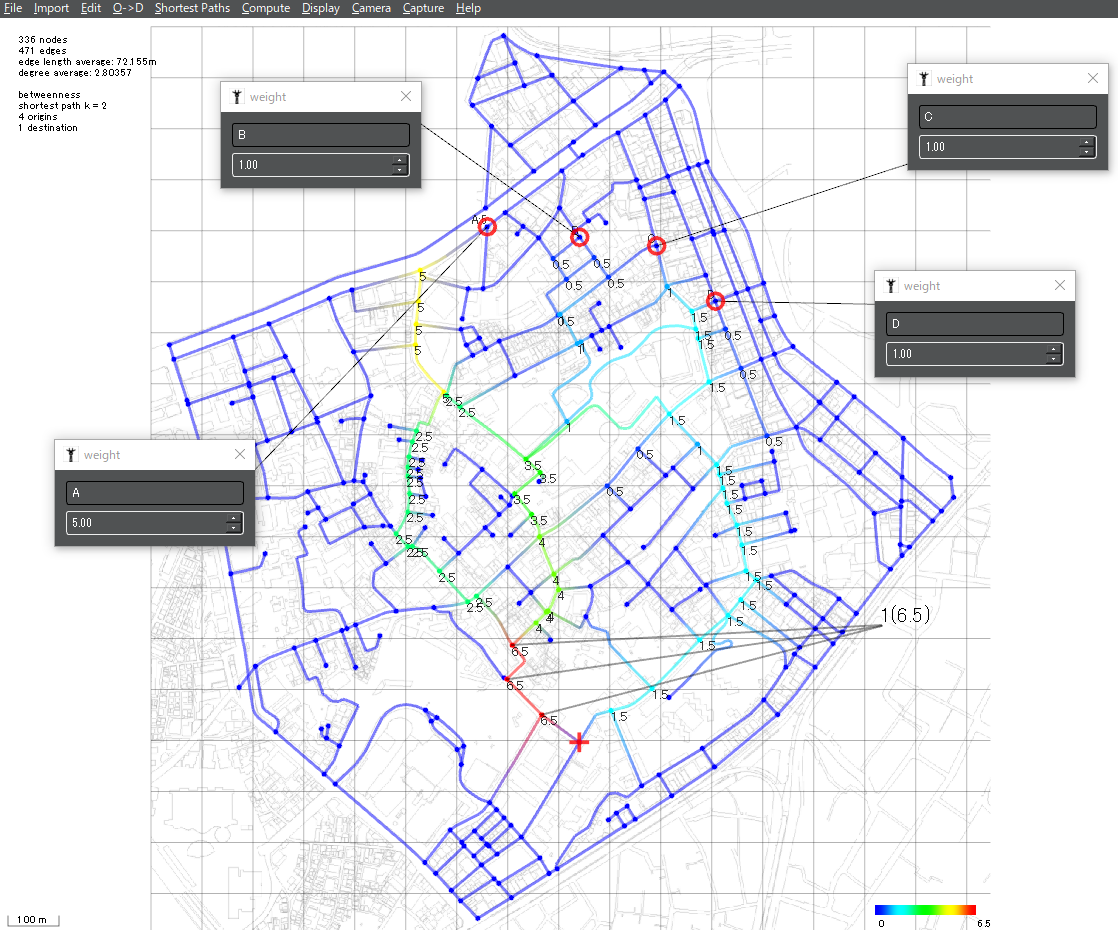
マニュアル 最短経路 Find Shortest Route(s): 最短経路を探索します。探索には出発ノードと目的ノードを選択する必要があります。 k = : 最短からk番目に短い経路を探索します。 buffer = : 最短から○○分の到...
マニュアル 編集 Connect:ノードとノードを新しいエッジで接続します。Connectボタン押下後、画面上でノードをクリックしてください。 Remove Edge:エッジを消去します。Remove Edgeボタン押下後、画面上でエッジ...