
g-raph 本体とtcp/ip接続してJSONを使ったコミュニケーションができます。
g-raph_plugin_server 1.0.0
0.9.0 new 2022 18 Aug. with python wrap module
0.9.1 updated 2022 25 Sep.
1.0.0 updated 2023 26 Mar.
1.0.2 updated 2023 12 Dec.
981 Downloads
サーバー起動方法(デフォルトでg-raph起動時にサーバーもスタートしています)

パイソンモジュール ‘py_g_raph.py’ をライブラリパスかpythonスクリプトの隣に置いてください
このモジュールはpackage化されていません。一つのpython スクリプトファイルです。
python module py_g_raph version 1.0.0
python module py_g_raph version 0.9.1 updated 2022 25 Sep.
python module py_g_raph version 1.0.0 updated 2023 26 Mar.
python module py_g_raph version 1.0.2 2023 18 Dec.
575 Downloads
import py_g_raph as g
g.init()import py_g_raph as g
g.init('127.0.0.1', 313)import py_g_raph as g
if(g.init()):
g.clear()
g.setLengthUnit('Meters')
poss = []
poss.append([0, 0, 0])
poss.append([0, 10, 0])
poss.append([20, 30, 0])
poss.append([-10, -20, 0])
poss.append([-10, 10, 0])
poss.append([-120, 30, 0])
poss.append([-120, -20, 0])
res = g.addNode(poss)
print(res)
g.addEdge(1, 0)
g.addEdge(1, 2)
g.addEdge(3, 0)
g.addEdge(0, 4)
g.addEdge(4, 1)
g.addEdge(4, 2)
g.addEdge(4, 3)
g.addEdge(5, 3)
g.addEdge(5, 2)
g.addEdge(5, 6)
g.addEdge(6, 3)
g.fitCamera()
g.clearOrigins()
g.clearDestinations()
g.addOrigins([2])
g.addDestinations([6])
g.setShortestK(2)
res = g.findshortestpaths()
for rt in res:
print(rt._node_ids)
print(rt._length)
print(rt._reachtime*60, 'min')
g.showDisplayNodeID(True)
g.showDisplayNodeInfo(True)
g.setDisplaySizeRouteArrow(2.0)
g.setDisplaySizeNode(6)
g.edgeDisplayMode('evaluation')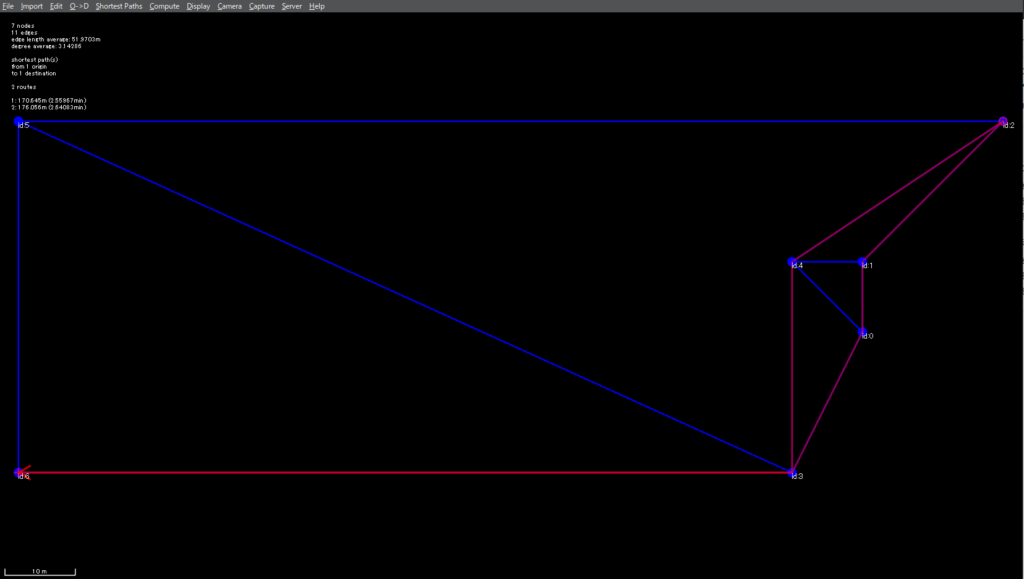
2件のコメント
コメントはできません。